專題製作說明簡報
第1組 第2組 第3組 第4組 第5組 第6組 第7組 第8組 第9組 第10組
第4週開始【萬獸之王】專題課程
學生分成10組,選擇參賽動物分別為獵豹、雲豹、猴子、熊貓、樹懶、公鹿、倉鼠、柴犬、公牛、波貓。
以終為始:各組先思考預計的動物運動比賽規則,例如:運動快、運動慢、會爬坡、會轉圈、會走直線...。
再決定各小組的動物名稱,上網搜尋真實動物照片,預計在第7週使用超輕土,製作動物頭型。
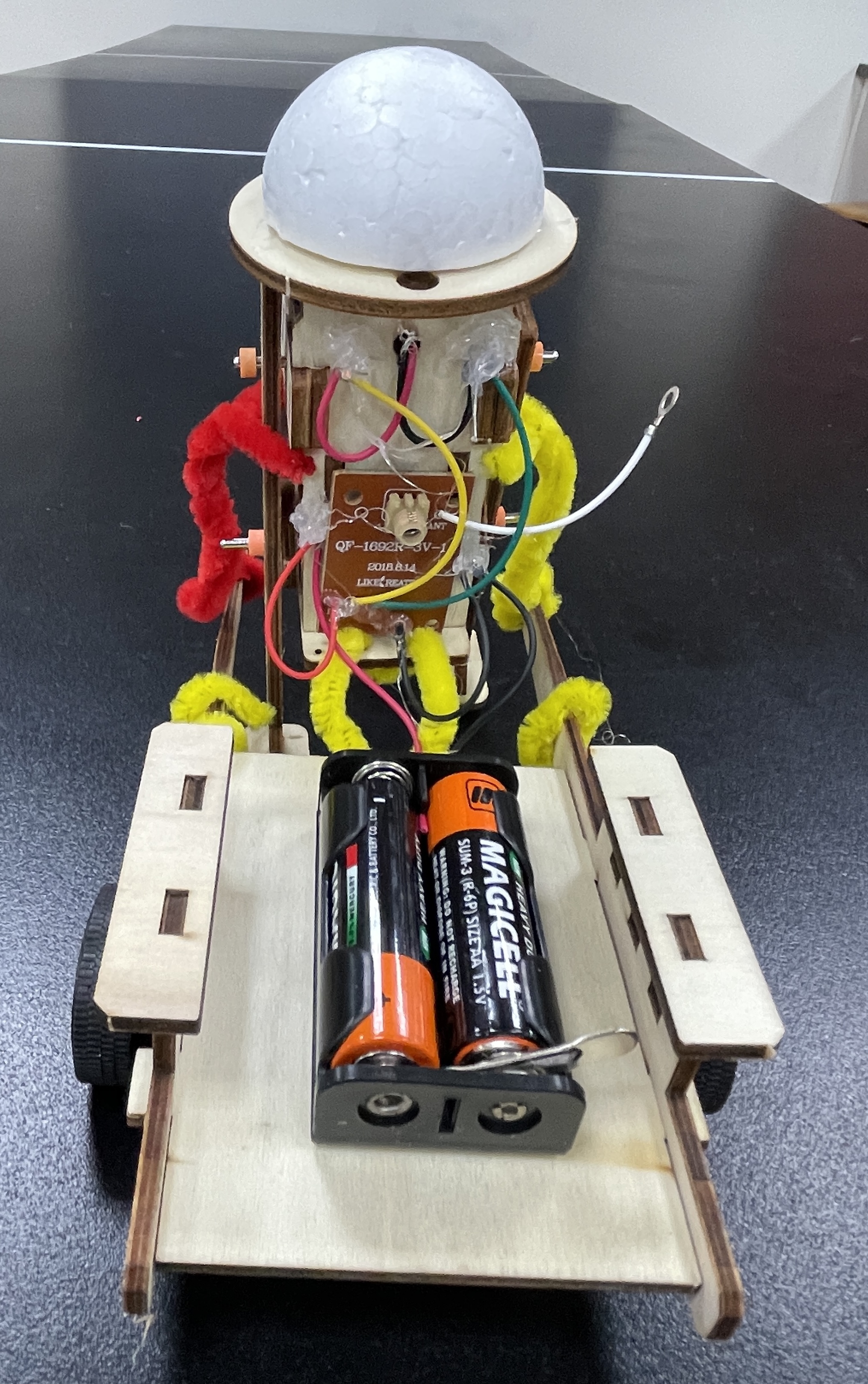
第4-6週專注於齒輪、馬達的組裝與修正,確認肢體可以流暢運動。
利用膠槌組裝腳掌與4肢,學習控制作用點與施力大小,避免發生斷裂。如果斷裂,學習使用熱熔膠槍,進行修復。確認3種齒輪排列順序。
重點1:膝蓋彎曲+腳趾頭方向一致。
重點2:分辨3種齒輪樣貌,標上1、2、3號。
重點3:認識變速馬達齒輪盒,公盒與母盒
_____________________________________________________________________
20240319 任務分工
________________________________________________________________________________
20240402 競賽規則 & 測速
計時工具 timer
測量小組機械獸移動100cm所需要的時間。根據自己小組的機械獸優勢與劣勢,設計競賽規則。
20240423專題報告示範稿(4分鐘)
大家好,我們是五年三班第七組倉鼠,今天很榮幸能與大家分享我們的萬獸之王專題報告。
我是研究長廖oo,專注於機械獸的修復與組裝。隊長李oo負責超輕土造型設計,紀錄長王oo則負責比賽規則的設計與規劃。而我們的第9組公牛隊代表徐oo也參與了比賽規則的設計與規劃。
在萬獸之王大賽中,我們選擇參賽動物包括獵豹、雲豹、猴子、熊貓、樹懶、公鹿、倉鼠、柴犬、公牛以及波貓。
首先,我們利用膠槌組裝腳掌與四肢,學習控制作用點與施力大小,避免肢體發生斷裂。如果不幸斷裂,就必須使用熱熔膠槍進行修復。接著,我們確認了三種齒輪的排列順序,以及馬達的電線正負極接法,因為如果接反了,機械獸會向後走。
在第一次的挑戰賽中,目前第四組的熊貓穩坐著10厘米及100厘米最慢賽的寶座,而第五組的樹懶則保持著第二名的位置。而在練習賽中,第一組的獵豹應該是目前速度最快的。
謝謝大家聆聽我們的分享,期待在下次比賽中與各位一較高下!
.png)
.png)




















.png)





.jpg)























